
When it comes to space missions, it’s easy to get carried away by the glamour of a project — space is sexy and exciting; however, it’s easy to overlook the plethora of components that are involved in bringing a project to fruition.

We have visions of the launcher, the satellite, the lunar rover... We give little thought to the complex components that enable one of these machines to make a specific maneuver, or what mechanics are required to help a satellite unfurl its solar panels so it can power up.
The development of a complex space project relies upon these small components to operate. They are the foundations that bring concepts to life.
Birth of a
Lunar Rover
One of these incredible projects is currently being undertaken by the University of Manchester in the United Kingdom (UK), where a team is working on the Rappelling and Exploration Robotics for Space Applications (RESA) project.
This project involves the development of a new lunar rover funded by the UK Space Agency Enabling Technologies Program (ETP) that provides opportunities for the UK space sector to accelerate the development of leading- edge technologies that could be used to tackle global problems and benefit the work of space organisations internationally.
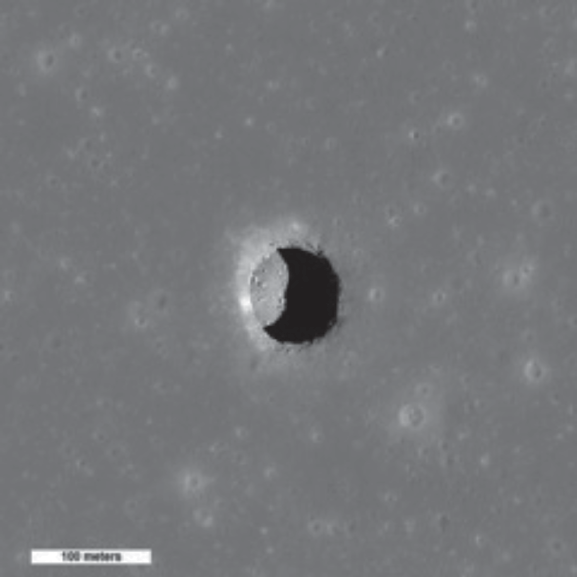
Mare_Tranquillitatis_pit_crater By NASA/GSFC/Arizona
State University, http///photojournal.jpl.nasa.gov/catalog/
PIA13518, Public Domain, https///commons.wikimedia.org/
w/index.php?curid=54853313.jpeg
The University of Manchester has been awarded £190,000 under this funding program to develop alternative motion techniques that expand the range and operating capabilities for extra-terrestrial robotics, supporting future rover and exploration missions.
The Scope
The project will develop and fabricate a jumping robot system capable of thrusting upwards, descending, and self-righting that will be lowered into lava tubes under the surface of the Moon which have been earmarked for potential initial future human habitation.
Findings from the exploration of the lava tubes will be relayed back to Earth, allowing for discovery of potential signs of life as it is suspected that water and other matter from the lava tubes may hold clues to questions posed around extraterrestrial life.
The rover itself will be omni-directional and will incorporate a payload driven-design and integrated sensors. The jumping motion of the rover will make navigation of the lava tubes more effective than a wheeled rover due to their rocky, uneven terrain.
The lander will collect data on the topography of the lava tubes from the probe to gain understanding on how viable the location is for habitation.
Exploration of
the lava tubes
The lander will incorporate a winch system that will enable the probe to be lowered into the lava tubes.
Olsen Actuators and Drives has provided an automated winch technology demonstrator for the project. This winch system will be an integral part of the rover design, as it will deploy and retrieve the probe from the lava tubes.

CLOVER Jumping Robot Space and Beyond. Image is courtesy of
University of Manchester.
This is a complex and ambitious part of the lunar rover development. The system must be able to accommodate a 50 meter drop into the lava tubes and weigh just 15 kg. The motor design must also be able to read the velocity of travel, and the system must drop at a uniform velocity of 0.5 m/s.
Challenges
of development
As you’d expect, the challenges associated with a lunar project are significant, due to the unique, lunar setting. The materials used must be able to withstand a hostile environment. Let’s look at some of the key hurdles for this particular winch system.
Ingress is a huge problem. Moon dust is positively charged, very abrasive and will invade anything within its path. Solar winds are at times strong and must be considered. Plastics cannot to be used in the final version for this reason, as any dust will cause damage and create malfunction.
The system must be efficient in its use of mass. Grams over kilograms are better for space deployment.
Finally, the thermal range is very high, from -100°C to a massive 270/280°C.
Quite uniquely, the number of operations that the system must undertake is in the realms of 1-2 cycles, due to the extreme conditions that will be encountered.

Concept build
The prototype winch comprised a housed motor within a 3D printed drum that is design to protect against ingress on exposed components, with the encoder constrained on the outer side of the drum, coupled to the motor output shaft.
The controller used for the prototype is a simple on/off unit with speed control elements.
Next Steps
for the Rover
The rover design will next be considered for future funding by the European Space Agency (ESA) for a higher Technology Readiness Level (TRL).
A space-suitable design has been proposed with exclusively, space- rated elements. These are much smaller, lighter and can withstand high levels of radiation and extreme temperature variations.
The design will also feature remote drive control, with encoder positioning and hall effect sensors within the motor — all indicating the position of the drum and therefore position of cable extension and payload from a remote location.
Space-based systems and orbital services are vital for global development, sustainability, and for improving our understanding of the universe. This is a challenging project to undertake due to the conditions on the Moon and the drive system is integral to the success of the rover project.

The development of space-rated components, such as the drive system, and the many considerations that working in a space environment encompasses, is enabling humanity to push the boundaries and establish whether there is a realistic chance that we can find new habitats in our solar system.
It’s mind-blowing to think that these extremely small yet complex components play such a fundamental role in how those journeys of exploration begin — and they enable us to dream of what they might unveil to us.
www.olsenactuators.com