
GMV Innovating Solutions, in cooperation with other Polish entities, leads the development of the GNSS Software Defined Radio (SDR) Receiver (hereinafter called the GNSSW Receiver) for multiple space applications that include microlaunchers and smallsats in Low Earth Orbit (LEO).
The resulting GNSSW Receiver is a long-term investment by GMV in Poland under the framework of ESA projects within the Polish Industry Incentive Schemes and NAVISP Program. GMV in Poland developed a solution for which the entire signal processing is performed as the software execution.
For the implementation of hardware elements, such as Front-End, carrier board for processing unit or protective enclosure, GMV asked for assistance from the companies that have high-level expertise in such developments within the Polish market. Nowadays, the adaptability to multiple platforms is extremely valuable in the space industry and the GNSSW Receiver is designed specifically to achieve this result.
This type of solution has a twofold objective: the ability to integrate the receiver with the available, on-board computer of the client with limited integration workload, and the ability to upgrade/configure (by means of software upgrade or new configuration) the receiver for more powerful computers/processors that will be available on the market in the future.
This will be accomplished, as an example, by increasing the number of satellites tracking channels, increasing the acquisition or tracking sensitivity, or adding more signals to be tracked (additional constellation or encrypted signals).
The receiver, which was originally designed for single MCU (PowerPC), has been thoroughly adapted and integrated to enable parallel performance of tasks with the recently updated version of the operating system RTEMS 5.0 (endorsed for more than two decades for space applications) for Symmetric Multiprocessing (SMP) on the relatively new GR740 platform (4 cores) and PicoZed 7015/7030 (2 cores).
This parallelization approach makes the receiver scalable to multi-core processors with minor SW updates as well as allows hosting various SW applications on the same computer. The GNSSW Receiver, being possibly run on one to four cores, provides the ability to host, for example, guidance, navigation and control (GNC) algorithms on one core and the receiver on the remaining three cores.
SMP allows the system to assign tasks automatically to free (not currently busy with performing tasks/functions) cores of the microprocessor and/or allows the user to assign a task manually to a defined core (the so-called affinity).
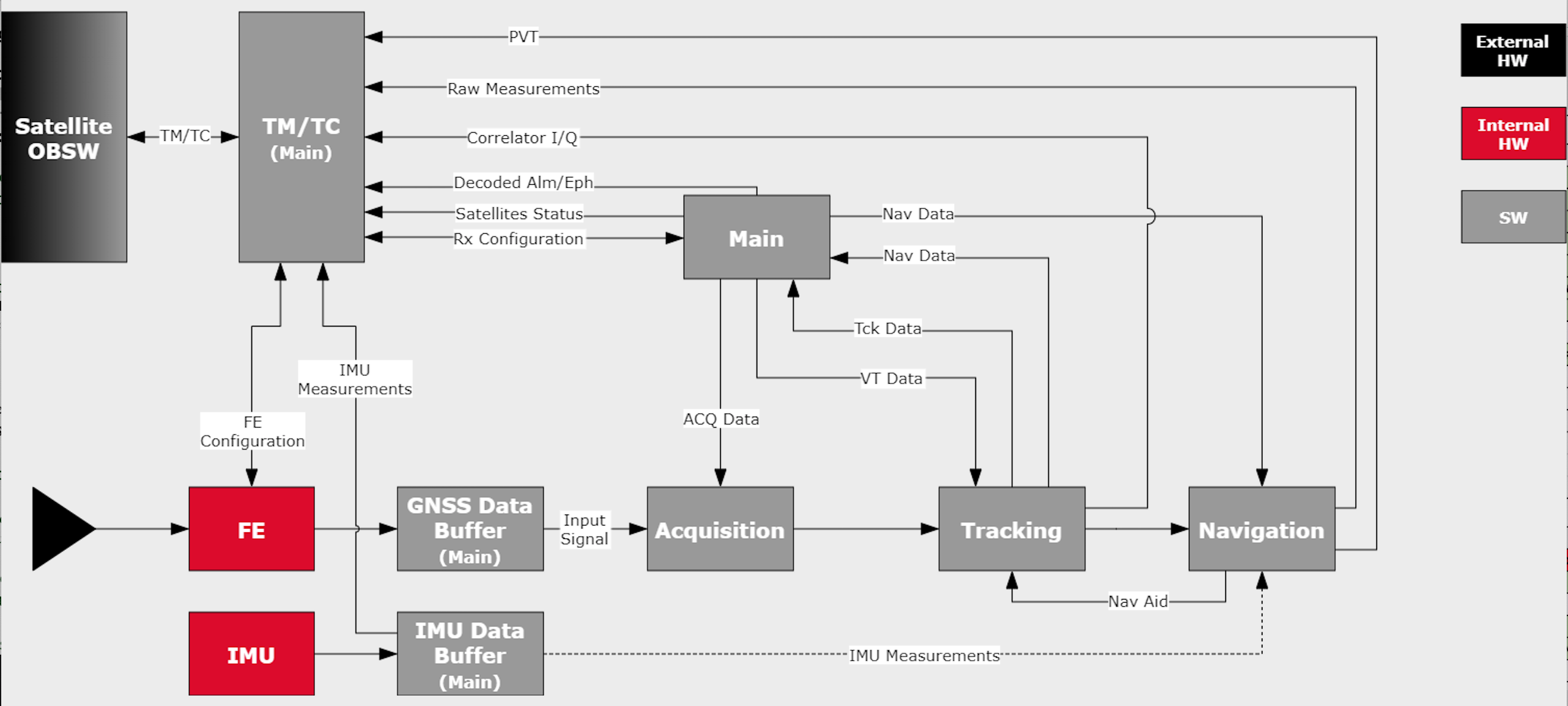
Figure 1: The GNSSW Receiver high-level architecture. (click to enlarge)
The GNSSW Receiver can carry out the following four functions:
Main function: responsible for parsing TM/TC (PUS protocol), getting data from the RF Front-End, managing modes and controlling RTEMS 5.0 tasks
Acquisition (ACQ): asynchronous function of searching available satellites in a frequency domain
Tracking (TCK): function of satellite tracking, raw measurements generation, decoding navigation message and also time domain acquisition; each tracking task can consist of a set of tracking channels
Navigation (NAV): function of PVT calculation (LSQ or EKF); it can be supported by IMU measurements (Figure 1).
Each function can be assigned to any of the MCU cores and easily synchronized by RTEMS 5.0 event manager, which is a high-performance method for inter-task communication with a minimum delay impact. An easy adaptation of the GNSSW Receiver to multiple platforms is possible because of modular software architecture as well as due to flexible interface with external hardware.
In order to meet the expectations of potential clients, it was decided to implement the ESA Packet Utilization Standard (PUS). This standard is recommended by the Inter-Agency Consultative Committee for Space Data Systems (CCSDS) and is mandatory for future ESA programs.
However, while this packet standard is intended for the transfer of information between the ground segment systems and the on-board application processes, it leaves open the internal structure of the packets. GMV Innovating Solutions engineers developed their own content of the PUS, which comprises two types of messages:
Telecommand (TC) to be uploaded: configuration of the front-end module and GNSSW Receiver; almanacs and ephemerides to support warm start; operative commands of the receiver (start, stop, restart); requests for current working status.
Telemetry (TM) to be downloaded: reports on current position, velocity and time (PVT); information about satellite tracking; events like completion of navigation message (almanac or ephemeris) decoding; system work status and hardware housekeeping (MCU temperature, MCU load, current draw and voltage supply).
As of this writing, the GNSSW Receiver Flight Model (See Figure 2) is engaged in laboratory tests (with the Spirent simulator). These are preliminary tests before the actual flight tests that will be carried out on board the MIURA1 microlauncher, whose start is planned for 2021.
 Figure 2: The GNSSW Receiver high-level architecture
Figure 2: The GNSSW Receiver high-level architecture
The current implementation of the GNSSW Receiver can be described by the following features that were confirmed in the laboratory tests:
Twelve dual-constellation, single-frequency channels (GPS/GAL, L1/E1)
Acquisition sensitivity: 36 dBHz in frequency domain and 27 dBHz in time domain (via Virtual Tracking)
Tracking sensitivity: 27 dBHz; Short
Short TTFF : <5 min in Cold Start mode and <2 min in Warm Start mode.
Performance: <10 m, <0.1 m/s for LEO users and <30 m, <0.5 m/s
In regard to future developments, the capabilities of the GNSSW Receiver will be improved and will be extended by adding L5/E5 frequency processing. This, combined with an updated navigation function, will help to reduce the negative impact of atmospheric effects and consequently increase the accuracy level of the PVT solution.
Additionally, the current SW and HW architecture enables the implementation of critical (in terms of computational load) processing functions in FPGA, thus providing hardware acceleration and the ability to use the time saved on their computation to increase the number of tracking channels, reduce the time for first fix, or implement additional capabilities like relative navigation for small satellite constellations or docking.
In 2021, this upgraded version of the GNSSW Receiver developed by GMV in Poland will fly as payload onboard the GOMX-5 smallsat, which is ESA’s test bench for new smallsat technologies.
The GMV product provides capabilities such as real time, on-board positioning for the rapidly growing smallsat market and leaves room for additional functionalities, while at the same time offering a solution that can be easily adapted for specific user needs through its configurability and software updates without significant development effort.
www.gmv.com

Ambroise Bidaux-
Sokolowski

Sebastian Wildowicz

Artur Kobylkiewicz